













Black-and-White Industrial Camera Case Study: Dynamic Gripping and Guidance for Robotic Arms
In industrial automation production, the dynamic grasping of high-speed moving objects by robotic arms is a critical factor in enhancing efficiency. However, traditional vision systems struggle to meet the demands for real-time performance and precision. High-frame-rate monochrome cameras, with their unique advantages, have emerged as the ideal solution to this challenge.


The Significant Advantages of High Frame Rate Monochrome Cameras

High frame rates are the core feature of these cameras. With the ability to capture hundreds or even thousands of frames per second, they can clearly track the high-speed trajectories of objects over extremely short durations, much like a high-speed camera. Whether it's parts moving rapidly on a conveyor belt or product sorting on an assembly line, they deliver coherent, clear image sequences that provide precise motion information for robotic arms.
While monochrome imaging eliminates color, it delivers significantly higher contrast. In dynamic capture scenarios, features like edges and contours of objects against backgrounds become more pronounced, greatly reducing target recognition challenges. Even in complex lighting conditions or environments with interference, it accurately distinguishes target objects, enhancing positioning reliability.
Low-latency transmission is another key advantage. Paired with high-speed interfaces like Gigabit Ethernet (GigE), image data is rapidly and stably transmitted to processing units. This ensures robotic arms receive the latest information promptly, enabling real-time responses and preventing grasping errors caused by delays.
Implementation Plan for Precise Positioning and Guidance

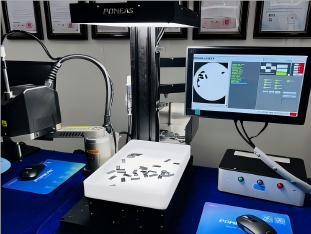
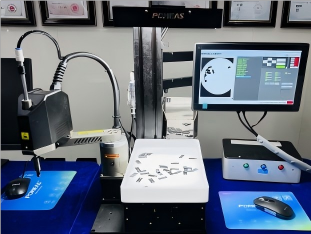
This solution establishes a comprehensive processing workflow. A high-frame-rate monochrome camera continuously captures images of the target object, which are then processed by the image processing unit. Target detection algorithms—such as edge detection or deep learning-based methods—are first applied to rapidly identify the target object within the image. Next, parameters like center coordinates and bounding boxes are calculated to determine the object's position within the image coordinate system. For objects requiring precise grasping, further estimates of its pose—such as rotation angle—are also computed. Subsequently, coordinate transformation algorithms convert the image coordinate information into the robotic arm's coordinate system, enabling the arm to pinpoint the target location.
The robotic arm control system generates control commands based on this information to drive the actuator's movements. To meet the real-time demands of dynamic grasping, a real-time control strategy is employed. This continuously adjusts the robotic arm's motion trajectory and grasping posture based on the target object's real-time position and pose changes, ensuring precise capture at the optimal moment.
High-frame-rate monochrome cameras provide robust visual support for robotic arm dynamic grasping. Through precise positioning and guidance, they significantly enhance the automation level and efficiency of industrial production, offering broad application and promotion value.
Product recommendation
TECHNICAL SOLUTION
MORE+You may also be interested in the following information
FREE CONSULTING SERVICE
Let’s help you to find the right solution for your project!

 ASK POMEAS
ASK POMEAS  PRICE INQUIRY
PRICE INQUIRY  REQUEST DEMO/TEST
REQUEST DEMO/TEST  FREE TRIAL UNIT
FREE TRIAL UNIT  ACCURATE SELECTION
ACCURATE SELECTION - APPICATION CASE
- RESOURCE CENTER
- DOWNLOAD CENTER
SOLUTIONS SUPPORT
- ZOOM LENS SELECTION TOOL
- TELECENTRIC LENS SELECTION TOOL
- FA LENS SELECTION TOOL
- ZOOM RATIO TABLE
- CERTIFIED MODEL
SELECTION TOOL
- WHY POMEAS
- FAQ
- PRIVACY POLICY
- TERMS OF USE
- DELIVERY & RETURN POLICY
CUSTOMER CARE
 ADDRESS
ADDRESS
Add.:No.68, Chongwei Road, Baizhoubian, East district, Dongguan, China, 523000
CONTACT
 Tel:+ 86-0769-2266 0867
Tel:+ 86-0769-2266 0867
 Fax:+ 86-0769-2266 0867
Fax:+ 86-0769-2266 0867
 E-mail:marketing@pomeas.com
E-mail:marketing@pomeas.com

Wechat QR code
Software Copyright :2021SR0176001 抄袭必究, 技术支持:誉新源科技